This is my second time doing Natcar.
Compare to last time, I have a lot of brand idea to achieve.
a line scan camera is used instead of analog front end solution
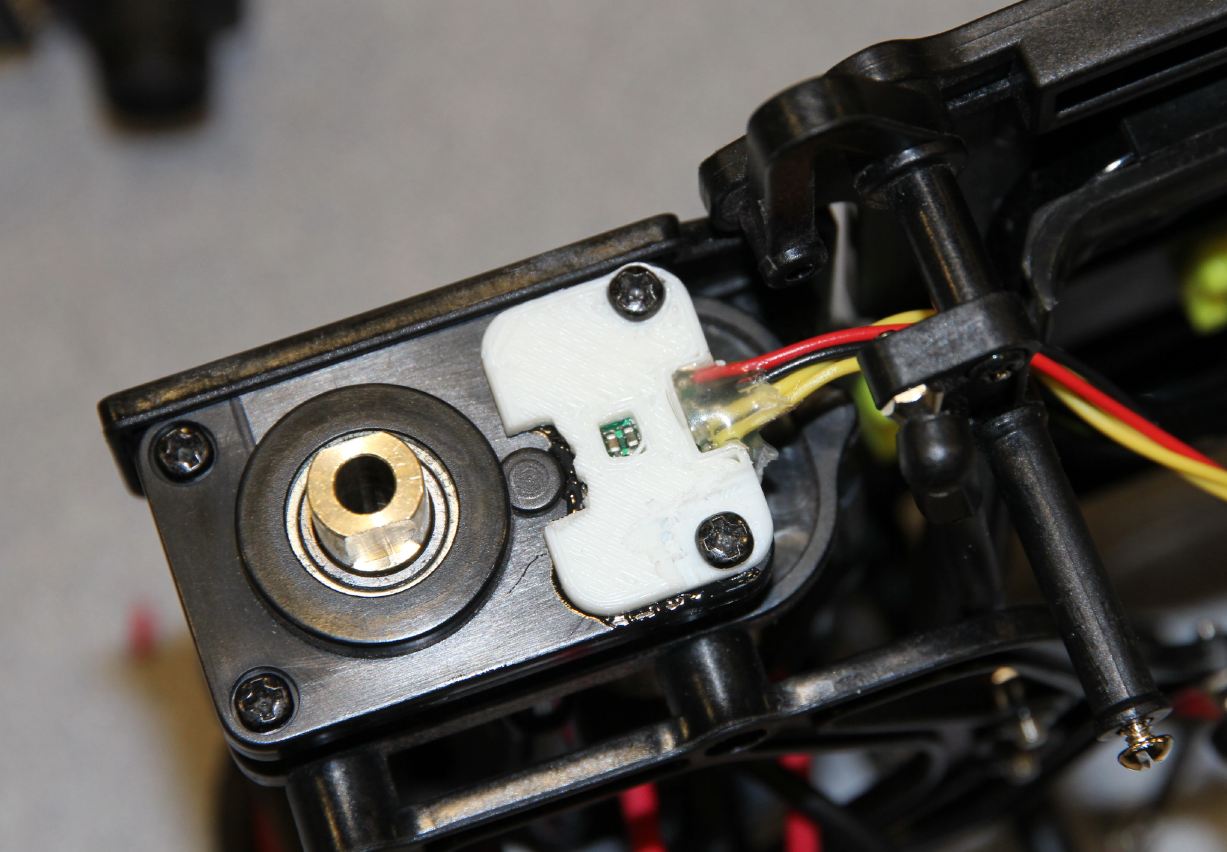
high resolution encoders from AMS were also mounted with customized mount on 2 motors by using differential control.
everything worked as what I expected expect the motors are way weaker when powered with 2 cell lipo battery.
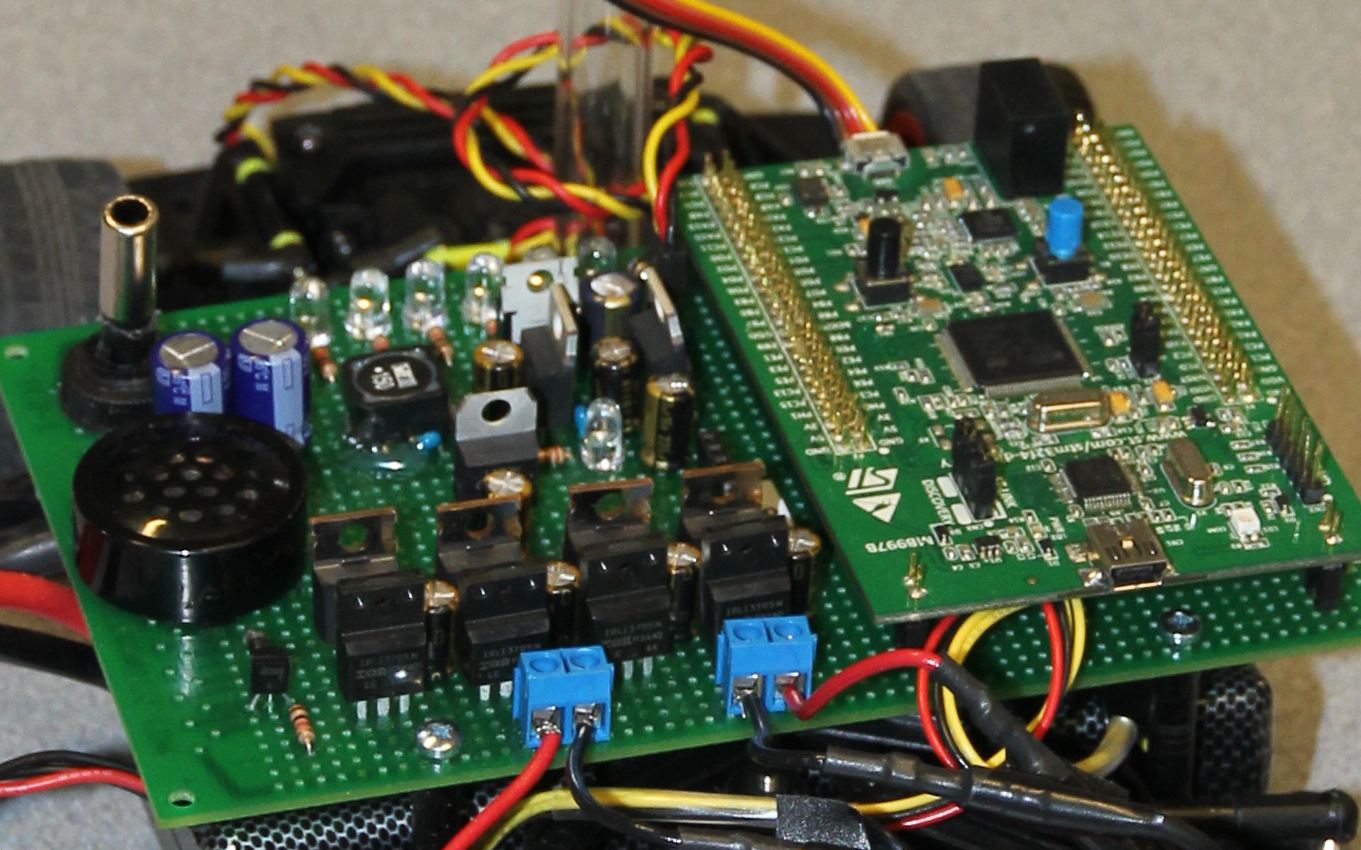
A perfboard based circuit is constructed since there was not enough time to fabricate PCB. However, most of the functionalities are achieved.
I used AS5145B high resolution(12bit) magnetic encoder from AMS, mount right above the motor shaft, and got about 30000 counts per wheel revolution
Circuit is very well designed, including all the conditions for power system in order to make both digital and analog power supply clean
Videos:
fastest run at 2014 Fullerton Natcar Competition
a even faster run after competition. This was pretty much the max speed due to the limit of motr
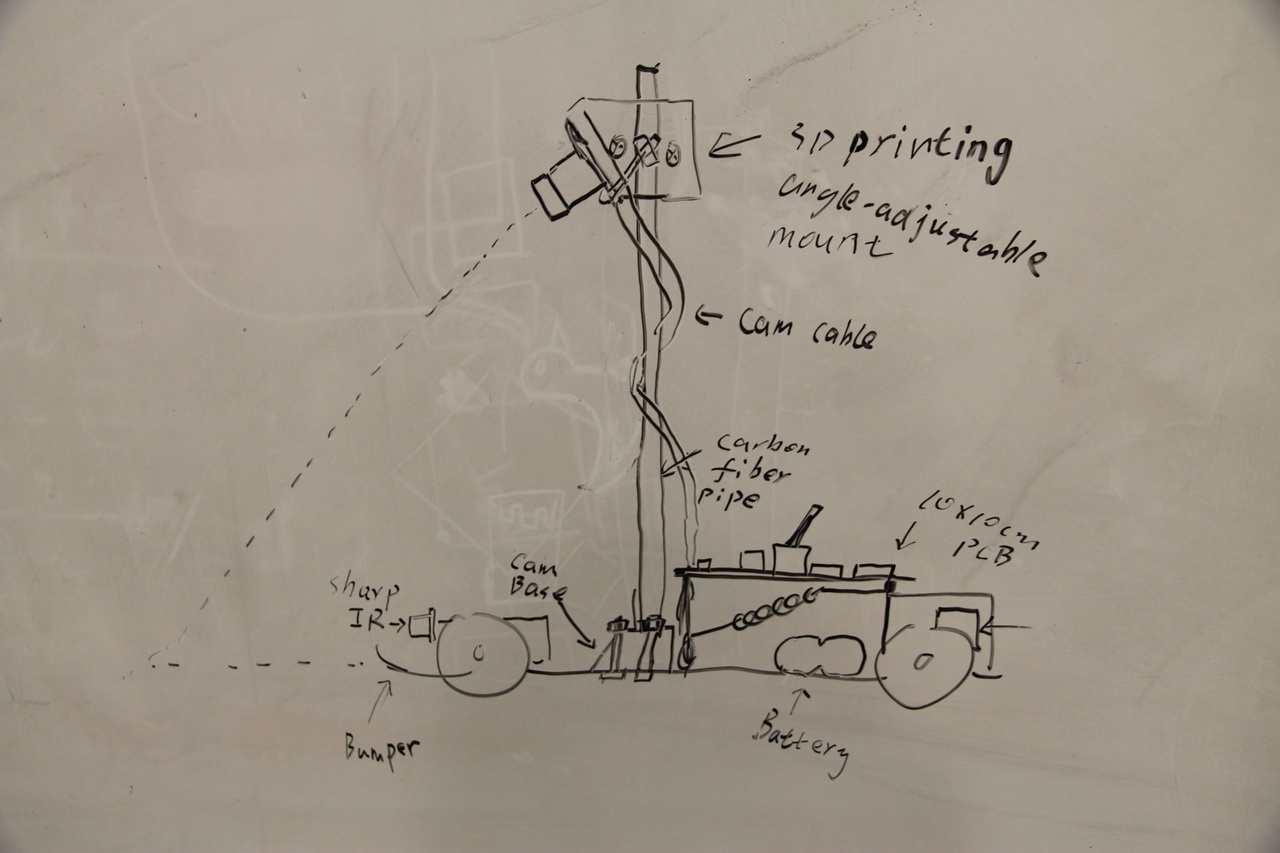
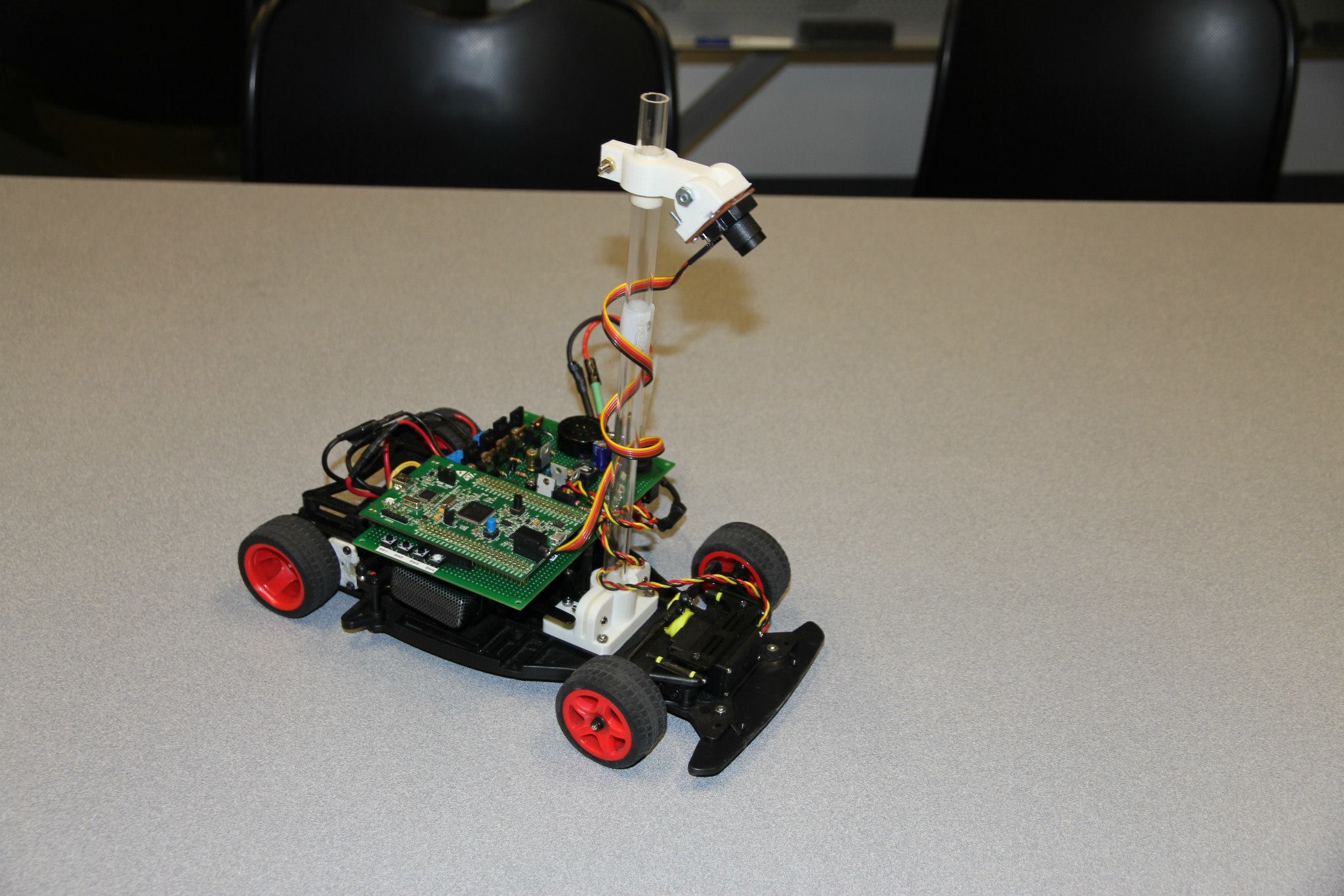
concept design stage: